Pose estimation is a fundamental building block of various vision applications like visual odometry, localization and navigation or fusion. Herein, we proposed novel solutions for the absolute and relative pose estimation of a multi-view camera system based on matching 2D-3D lines, which are common in urban environments, and not relying on any a priori knowledge like vertical direction, except the intrinsic calibration of the cameras.
One of the proposed methods works on perspective camera systems, while the other uses a more generalized formulation and works on central cameras including different omnidirectional ones.
Both methods estimate the absolute pose of the camera system relative to a 3D world coordinate frame, and also the relative pose between the cameras simultaneously.
MRPnL solver
We propose a direct least squares solution to the problem of absolute and relative pose estimation in a multi-view camera system. First, a direct solver using Grobner bases is proposed which works for any n ≥ 3 number of lines suitable for hypothesis testing like in RANSAC. The poses can be further refined through a few iterations of an iterative least squares solver, which runs efficiently due to the optimal initialization provided by our direct solver [2].
Video 1. Trajectory estimation results on 16 frames with MRPnL LM of a longer drone sequence. Ground truth camera poses and the trajectory are shown in green, the estimated ones in red, while the used 3D lines (81 in total) are also visible
Cayley solver
We propose a universal solution for central camera setups, that provides a direct least squares solution to the absolute and relative pose problem. First, a minimal direct solver using Grobner bases is proposed which works with 3 line pairs, suitable for hypothesis testing in RANSAC. Then a direct least squares solver is proposed which works for n ≥ 3 3D-2D line pairs. Both solvers run efficiently due to the low-order polynomial system of equations obtained via Cayley parametrization of the rotation matrix [1].
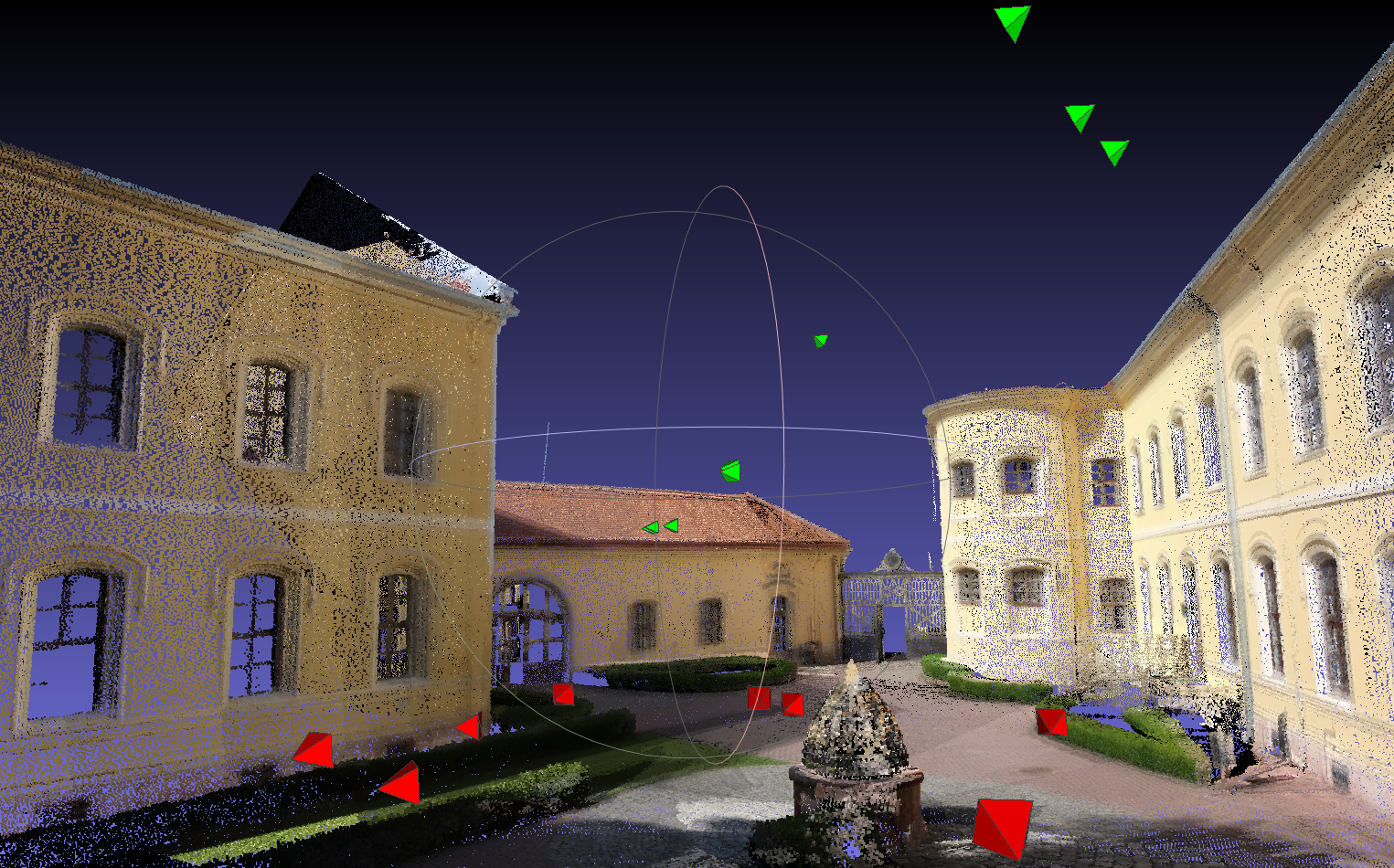
Video 2. Presentation of the fusion result shown as colorized pointcloud with estimated omni (red) and perspective (green) camera positions illustrated.
For the quantitative evaluation of our algorithms, we generated various benchmark datasets of 3D-2D line pairs. Each dataset has 1000 samples. The method was quantitatively evaluated on this large synthetic dataset as well as on a real dataset, which confirms its state of the art performance both in terms of quality and computational efficiency.
Publications to cite:
Hichem Abdellali, Robert Frohlich, Zoltan Kato, Robust Absolute and Relative Pose Estimation of a Central Camera System from 2D-3D Line Correspondences, In Proceedings of ICCV Workshop on Computer Vision for Road Scene Understanding and Autonomous Driving, Seoul, Korea, 2019.
[bibtex]
Hichem Abdellali, Robert Frohlich, Zoltan Kato, A Direct Least-Squares Solution to Multi-View Absolute and Relative Pose from 2D-3D Perspective Line Pairs, In Proceedings of ICCV Workshop on 3D Reconstruction in the Wild, Seoul, Korea, 2019.
[bibtex]
Hichem Abdellali has been awarded the Doctor of Philosophy (PhD.) degree...
2022-04-30
Hichem Abdellali has been awarded the KÉPAF Kuba Attila prize...