Research Group on Visual Computation
- Home
- Projects
- TODER Project
- Demo Software
- Open positions
- COSCH Training School 2015
- Publications
- Intranet
Robust Absolute and Relative Pose Estimation of a Central Camera System from 2D-3D Line Correspondences | |
 |
|
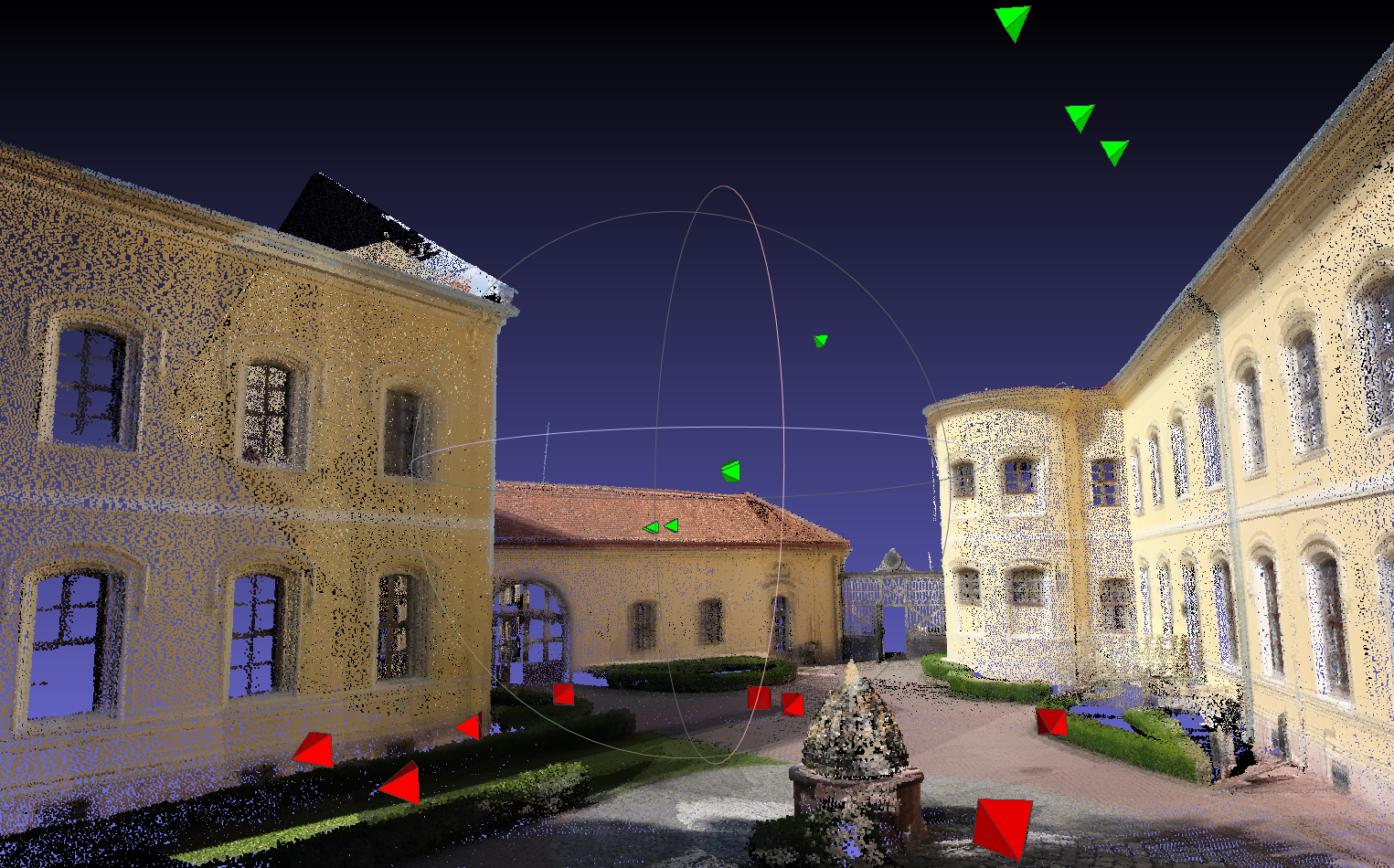
DescriptionThis page contains the proposed algorithm code to estimate the absolute and relative pose of a camera system composed of general central projection cameras such as perspective and omnidirectional cameras. The algorithm has been validated on a large synthetic dataset as well as real data. Experimental results confirm the stable and real-time performance under realistic outlier ratio and noise on the line parameters. Comparative tests show that our method compares favorably to the latest state of the art algorithms. FilesAll the codes are released under the GNU General Public License and contain the methods described in our [1] publication, you can download the full test environment here: code
Example input: input: Data for 3 cameras (2 perspective + Omnidirectional) and 60 2D-3D line correspondances
Example input: input for the RANSAC demo, the example data has 3 cameras (perspective, perspective and omnidirectional) and 120 lines (60 lines/120 are outliers). 'threshold' is the backprojection value that separate the inliers from the outliers Input parameters:
Output:
Please cite our [1] publication whenever you use the implementation. |
- Hichem Abdellali, Robert Frohlich, Zoltan Kato, Robust Absolute and Relative Pose Estimation of a Central Camera System from 2D-3D Line Correspondences, In Proceedings of ICCV Workshop on Computer Vision for Road Scene Understanding and Autonomous Driving, Seoul, Korea, 2019. [bibtex]
Hichem Abdellali has been awarded the Doctor of Philosophy (PhD.) degree...
2022-04-30
Hichem Abdellali has been awarded the KÉPAF Kuba Attila prize...
2021-06-24