Research Group on Visual Computation
- Home
- Projects
- TODER Project
- Demo Software
- Open positions
- COSCH Training School 2015
- Publications
- Intranet
Demo Software
 | A Direct Least-Squares Solution to Multi-View Absolute and Relative Pose from 2D-3D Perspective Line Pairs We propose a new algorithm for estimating the absolute and relative pose of a multi-view camera system. We derive a direct least squares solver using Grobner basis which works both for the minimal case (set of 3 line pairs for each camera) and the general case using all inlier 2D-3D line pairs for a multi-view camera system. The algorithm has been validated on a large synthetic dataset as well as real data. Experimental results confirm the stable and real-time performance under realistic outlier ratio and noise on the line parameters. Comparative tests show that our method compares favourably to the latest state of the art algorithms. | 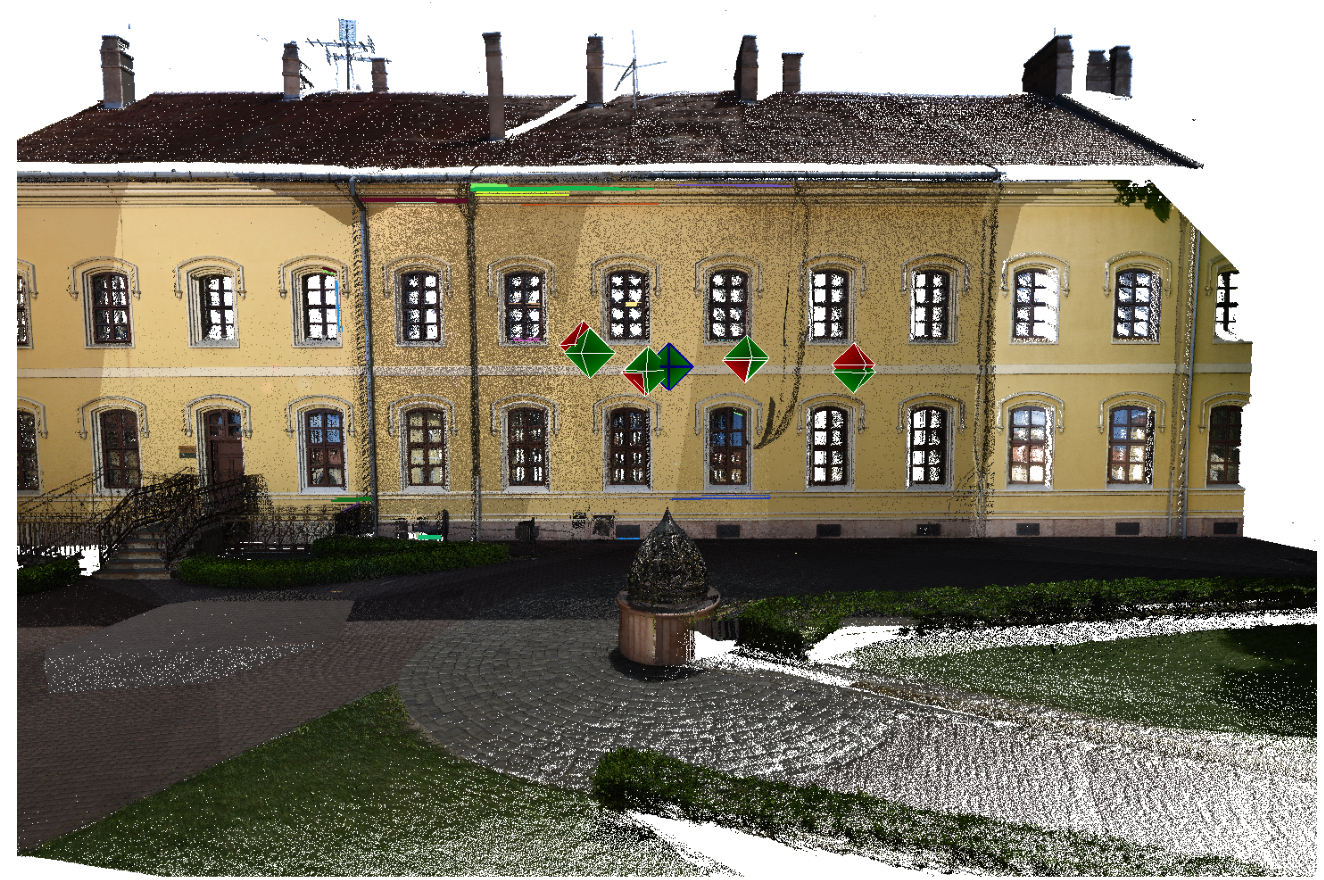 | Absolute and Relative Pose Estimation of a Multi-View Camera System using 2D-3D Line Pairs and Vertical Direction We propose a new algorithm for estimating the absolute and relative pose of a multi-view camera system. The algorithm relies on two solvers: a direct solver and a least-squares solver which uses all inlier 2D-3D line pairs. The algorithm has been validated on a large synthetic dataset, experimental results confirm the stable and real-time performance under realistic noise on the line parameters as well as in the vertical direction. Furthermore, the algorithm performs well on real data. |
| Affine Registration of 3D Objects Sample implementation and benchmark dataset of a correspondence-free binary 3D image registration algorithm. | Affine Registration of Planar Shapes Sample implementation and benchmark dataset of a correspondence-free binary image registration algorithm. | ||
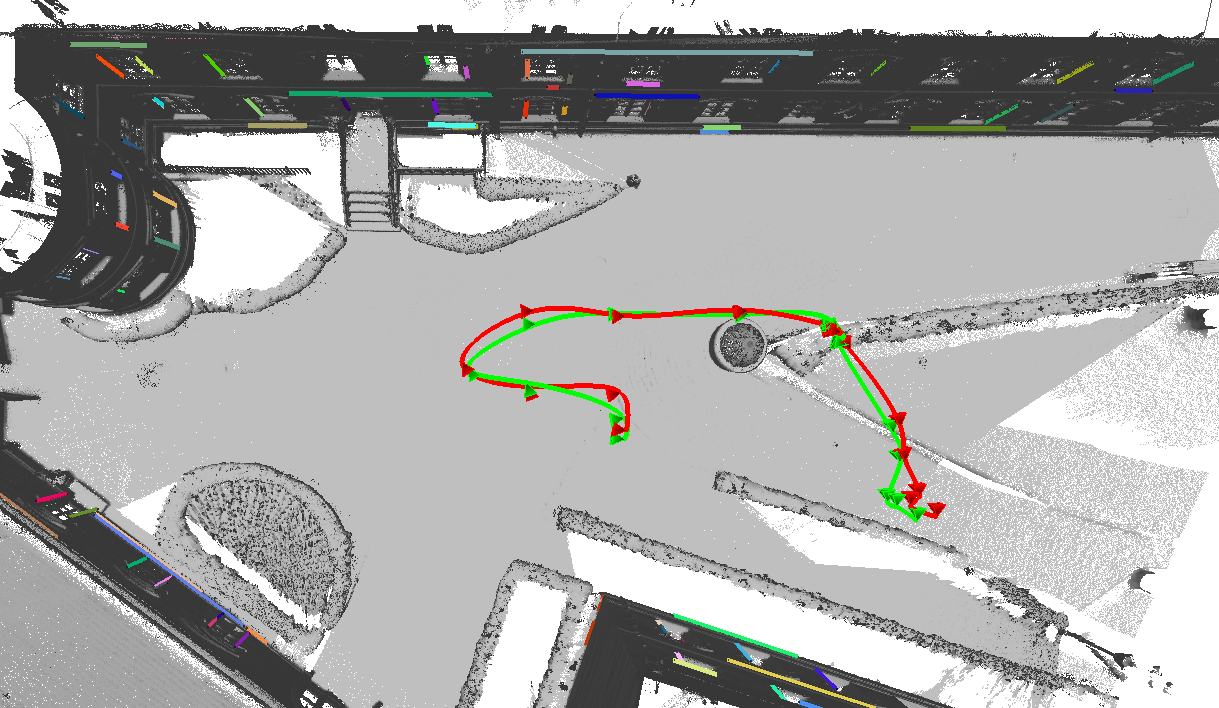
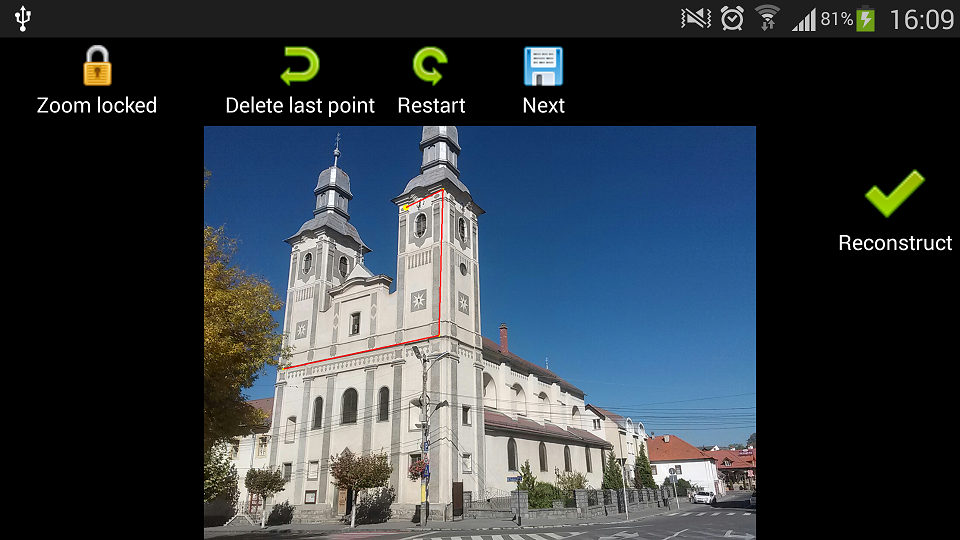 | Collaborative Mobile Image Processing Demo Application Reconstruction of the surrounding 3D world is of particular interest either for mapping, civil applications or for entertainment. We proposed a pipeline that utilizes an ad-hoc network of camera equipped smartphones in a collaborative manner. Data, computations and results can be shared among the participant devices without centralization. The reconstruction is based on segmented planar regions which is especially suitable for scenes having large (near) planar parts. Once the calibration parameters are known, the perspective distortion of a planar region in two views makes it possible to compute the normal and distance of the region w.r.t the world coordinate system. |  | Generalized Pose Estimation from Line Correspondences with Known Vertical Direction Pose estimation is a fundamental building block of various vision applications, e.g. visual odometry, image-based localization and navigation, fusion, and augmented reality. Herein, we are interested in absolute pose estimation with line correspondences, which consists in determining the position and orientation of a camera with respect to a 3D world coordinate frame. |
 | Multiview Absolute Pose Using 3D – 2D Perspective Line Correspondences and Vertical Direction Pose estimation is a fundamental building block of various vision applications, e.g. visual odometry, image-based localization and navigation, fusion, and augmented reality. Herein, we are interested in absolute pose estimation with line correspondences, which consists in determining the position and orientation of a camera with respect to a 3D world coordinate frame. |  | Nonlinear Shape Registration without Correspondences Sample implementation and benchmark dataset of a nonlinear registration algorithm for recovering planar homographies between 2D shapes. |
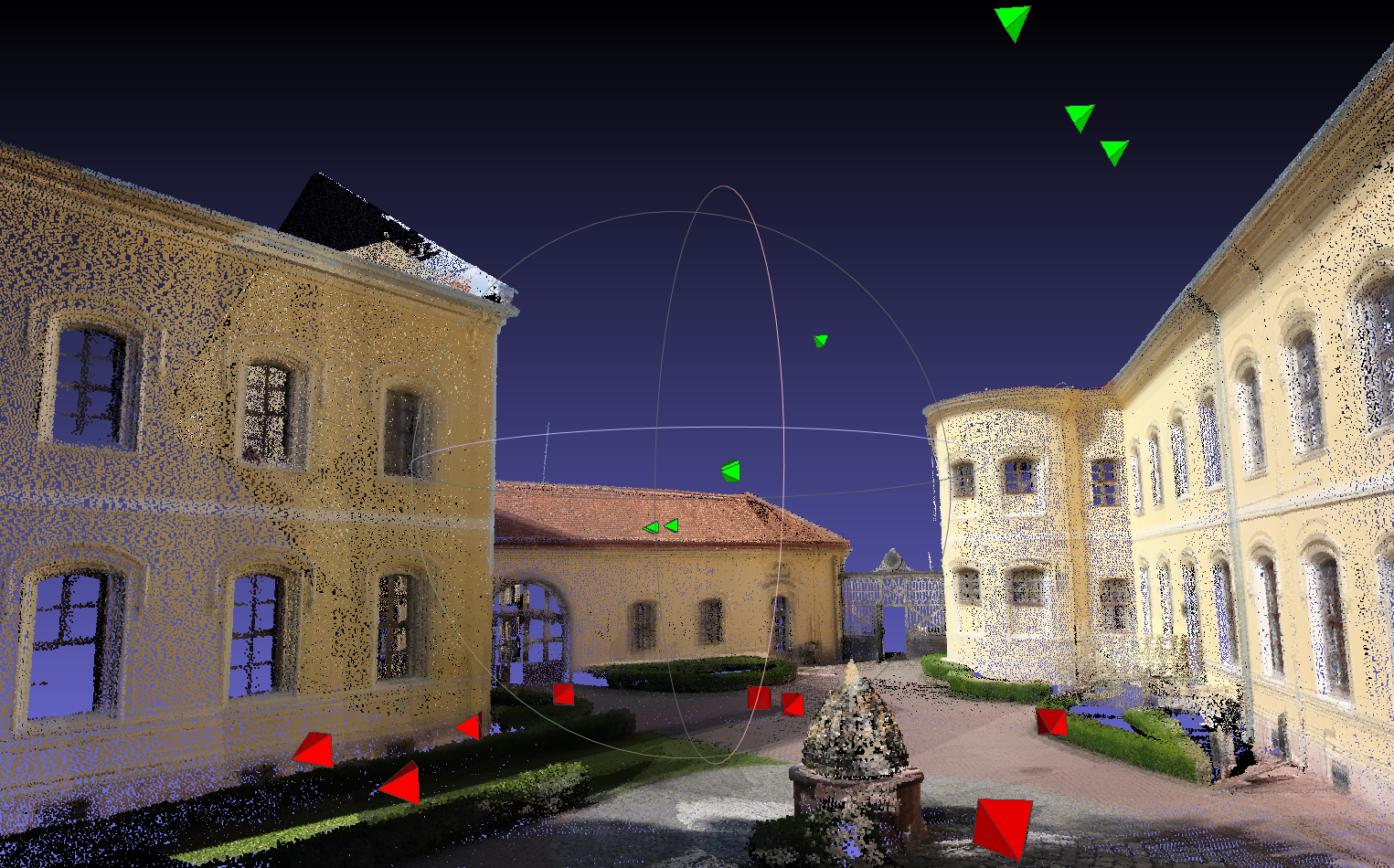 | Robust Absolute and Relative Pose Estimation of a Central Camera System from 2D-3D Line Correspondences We propose a new algorithm for estimating the absolute and relative pose of a camera system composed of general central projection cameras such as perspective and omnidirectional cameras. First, we derive a minimal solver for the minimal case of 3 line pairs per camera, which is used within a RANSAC algorithm for outlier filtering. Second, we also formulate a direct least squares solver which finds an optimal solution in case of noisy (but inlier) 2D-3D line pairs. Both solvers rely on Grobner basis, hence they provide an accurate solution within a few milliseconds in Matlab. The algorithm has been validated on a large synthetic dataset as well as real data. Experimental results confirm the stable and real-time performance under realistic outlier ratio and noise on the line parameters. Comparative tests show that our method compares favorably to the latest state of the art algorithms. |  | Supervised Color Image Segmentation in a Markovian Framework This is the sample implementation of a MRF-based color image segmentation algorithm. |
 | Supervised Image Segmentation Using Markov Random Fields This is the sample implementation of a MRF-based grayscale image segmentation algorithm. |
Hichem Abdellali has been awarded the Doctor of Philosophy (PhD.) degree...
2022-04-30
Hichem Abdellali has been awarded the KÉPAF Kuba Attila prize...
2021-06-24