Research Group on Visual Computation
- Home
- Projects
- TODER Project
- Demo Software
- Open positions
- COSCH Training School 2015
- Publications
- Intranet
Active projects
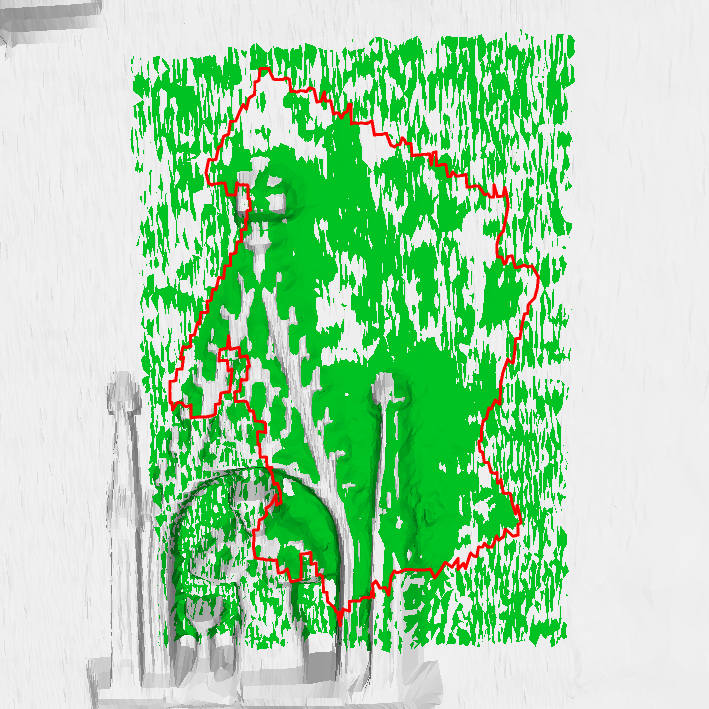
| Estimating Low-Rank Region Likelihood Maps Herein, we propose a novel self-supervised low-rank region detection deep network that predicts a low-rank likelihood map from an image. The evaluation of our method on real-world datasets shows not only that it reliably predicts low-rank regions in the image similarly to our baseline method, but thanks to the data augmentations used in the training phase it generalizes well to difficult cases (e.g. day/night lighting, low contrast, underexposure) where the baseline prediction fails. | 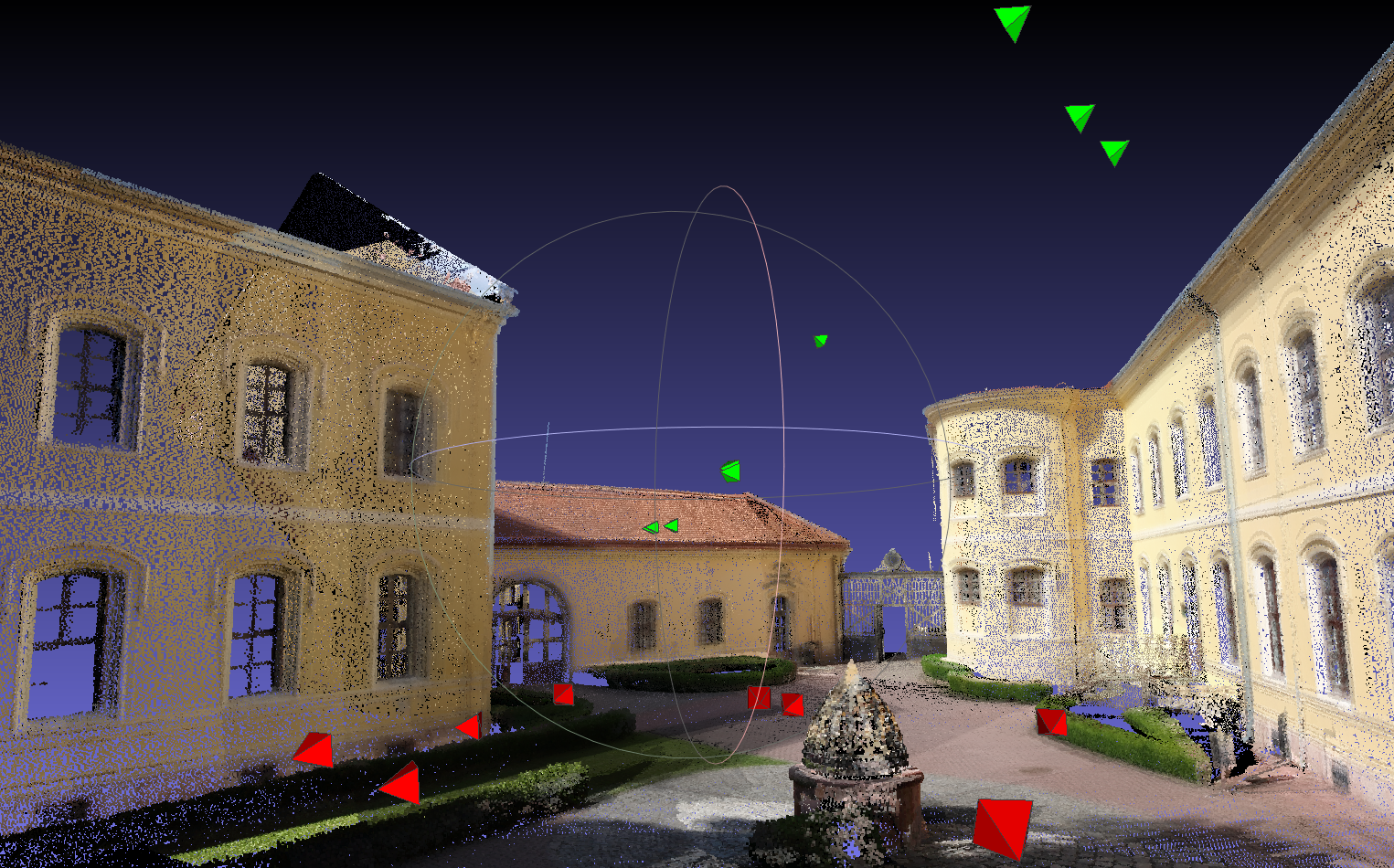 | Multi-view Pose Estimation from Line Correspondences Pose estimation is a fundamental building block of various vision applications like visual odometry, localization and navigation or fusion. Herein, we proposed novel solutions for the absolute and relative pose estimation of a multi-view camera system based on matching 2D-3D lines, which are common in urban environments, and not relying on any a priori knowledge like vertical direction, except the intrinsic calibration of the cameras. One of the proposed methods works on perspective camera systems, while the other uses a more generalized formulation and works on central cameras including different omnidirectional ones. Both methods estimate the absolute pose of the camera system relative to a 3D world coordinate frame, and also the relative pose between the cameras simultaneously. | |
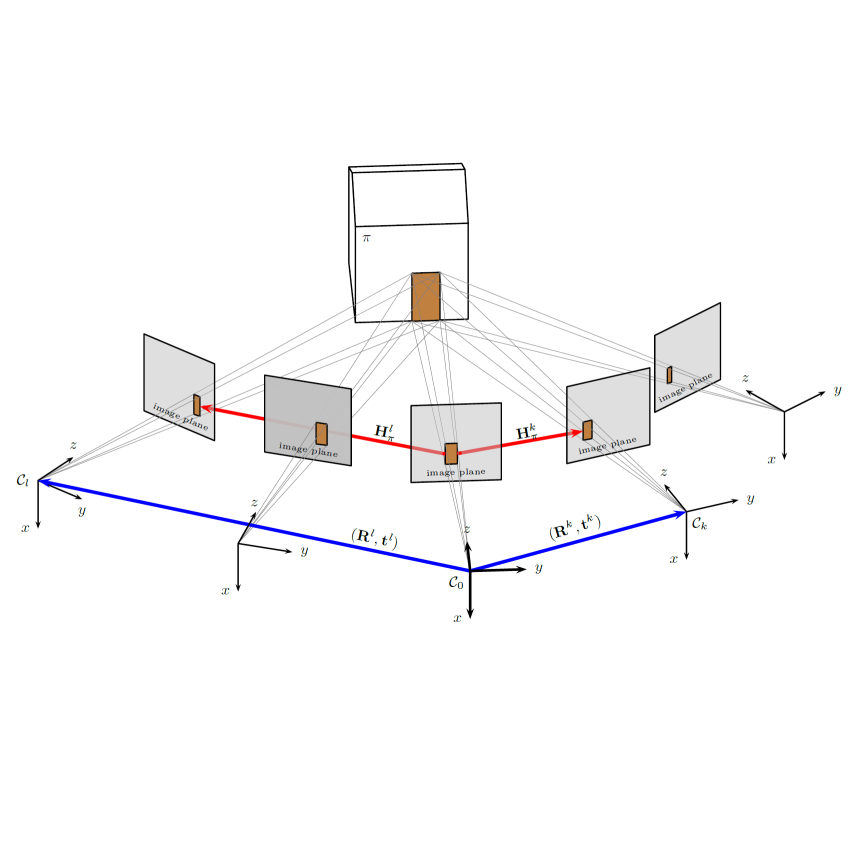 | Simultaneous Multi-View Relative Pose Estimation and 3D Reconstruction from Planar Regions In this project, we propose a novel solution for multi-view reconstruction, relative pose and homography estimation using planar regions. The proposed method doesn’t require point matches, it directly uses a pair of planar image regions and simultaneously reconstructs the normal and distance of the corresponding 3D planar surface patch, the relative pose of the cameras as well as the aligning homography between the image regions. When more than two cameras are available, then a special region-based bundle adjustment is proposed. | Line-based absolute pose with known vertical direction Pose estimation is a fundamental building block of various vision applications, e.g. visual odometry, image based localization and navigation, fusion, and augmented reality. Herein, we introduce our novel proposed solutions for pose estimation based on matching 2D-3D lines, which are common in urban environments. The proposed methods compute either the absolute pose of a camera system (relative poses between cameras are considered to be known) or the absolute and the relative poses as well, relying on a known vertical direction. Since modern cameras are frequently equipped with various locations and orientation sensors, the vertical direction (e.g. a gravity vector) can be available in many applications. | |
 | Filling Missing Parts of a 3D Mesh by Fusion of Incomplete 3D Data In this work we deal with the problem of fusing different (potentially partial) 3D meshes to fill in missing parts (holes) of an accurate reference 3D model using a less accurate but more complete moving 3D model. Each hole in the partial model is filled from the more complete but less accurate 3D mesh by gradually estimating local affine transformations around the hole's boundary and propagating it into the inner part. Experimental validation is done on a large real dataset, which confirms the accuracy and reliability of the proposed algorithm. | Correspondences between Planar Image Patches We focus on establishing matches between images of urban scenes which are typically composed of planar surface patches with highly repetitive structures. The basic idea of our approach is to formulate the correspondence problem in terms of homography estimation between planar image regions. | |
| Calibration of Ad-Hoc Camera Networks An automatic camera network calibration algorithm is proposed. Our aim is to solve the relative pose problem with respect to a 3D planar surface and create a coordinate-system having a camera independent origin. | Vision Graphs - Collaborative Compositing and View Construction This work is about local processing of photos and associated sensor information on mobile devices, laying the foundations of a collaborative multi-user framework where ad-hoc device groups can share their data around a geographical location to produce more complex composited views of the area, without the need of a cloud-based back-end. | ||
 | Calibration of Omnidirectional, Perspective and Lidar Camera Systems Automatic calibration of ominidirectional, perspective camera and lidar images is important for 3D model construction, robot navigation and environment mapping. The proposed methodology is without any specific constraint on source of data and the calibration can be performed using a single pair of lidar-camera image without any implicit correspondence between image points. | Collaborative Stereo Reconstruction of Planar Patches We proposed a pipeline that utilizes an ad-hoc network of camera equipped smartphones in a collaborative manner. The reconstruction is based on segmented planar regions which is especially suitable for scenes having large (near) planar parts. The perspective distortion of a planar region in two views makes it possible to compute the normal and distance of the region w.r.t the world coordinate system. | |
 | Evaluation of Point Matching Methods for Wide-baseline Stereo Correspondence on Mobile Platforms We carried out quantitative comparison of the most important keypoint detectors and descriptors in the context of wide baseline stereo matching. We found that for resolution of 2 megapixels images the current mobile hardware is capable of providing results efficiently. | Elastic Registration of 3D Objects Correspondance-less alignment of 3D non-rigid objects using parametric nonlinear deformation models. Our algorithms are able to estimate the parameters of the deformation without an established set of correspondences, thus providing a fully automatic and computationally efficient registration framework for 3D objects. | |
| Elastic Registration of Multimodal Prostate Images A novel method for non-rigid registration of transrectal ultrasound and magnetic resonance prostate images based on a non-linear regularized framework. | Extraction of Near Circular Objects using Markov Random Fields: The Multilayer 'Gas of Circles' Model A multi-layer binary Markov random field model for extracting an unknown number of possibly touching or overlapping near-circular objects. | ||
| Affine Puzzle A novel solution for reassembling a broken object from its parts without established correspondences, where each part is subject to a linear deformation. | Recovering Diffeomorfic Shape Deformations without Correspondences We consider the problem of estimation the parameters of transformations aligning two binary images. The advantage of our algorithm is that it is easy to implement, less sensitive to the strength of the deformation, and robust against segmentation errors. | ||
| Estimation of Linear Shape Deformations and its Medical Applications We consider the problem of planar shape registration on binary images. Our primary goal is to investigate novel methodologies which work without feature point extraction and established correspondences; avoid the solution of complex optimization problems; and provide an exact solution regardless of the strength of the distortion. The newly developed techniques are validated on medical images. |  | Higher Order Active Contours - the `Gas of Circles' Shape Prior The `gas of circles' (GOC) model is a tool to describe a set of circles with an approximately fixed radius. The model is based on the higher-order active contour (HOAC) framework. The method has been succesfully applied to tree crown extraction on aerial images. | |
 | Content Based Image Retrieval Using Stochastic Paintbrush Image Transformation Stochastic paintbrush rendering is an algorithm to simulate the painting process to get a picture similar to a real painting. The image can be described by the parameters of the consecutive paintbrush strokes, resulting in a parameter-series. In this project, we will explore this stroke-representation of images for Content Based Image Retrieval (CBIR). |  | Multicue Image and Video Segmentation: a Multi-layer MRF Framework The human visual system is not treating different features sequentially. Instead, multiple cues are perceived simultaneously and then they are integrated by our visual system in order to explain the observations. Therefore different image features has to be handled in a parallel fashion. In this project, we attempt to develop such a model in a Markovian framework. |
 | Automatic Color Image Segmentation via Reversible Jump MCMC The goal of this project is to propose a method which is able to segment a color image without any human intervention. The only input is the observed image, all other parameters are estimated during the segmentation process. The algorithm finds the most likely number of classes, their associated model parameters and generates a segmentation of the image by classifying the pixels into these classes. |  | Cellular Neural Networks for Markov Random Field Image Segmentation The main contribution of this project is the implementation of a Markovian image segmentation model on a new chip, called CNN (Cellular Neural Networks), which is capable to do the task in real time. |
 | Multi-scale Markovian Modelisation in Image Segmentation and Remote Sensing This project is about image segmentation algorithms using a Markovian approach. The main contribution is a new hierarchical MRF model and a Multi-Temperature Annealing (MTA) algorithm proposed for the energy minimization of the model. The convergence of the MTA algorithm has been proved towards a global optimum in the most general case, where each clique may have its own local temperature schedule. |
Hichem Abdellali has been awarded the Doctor of Philosophy (PhD.) degree...
2022-04-30
Hichem Abdellali has been awarded the KÉPAF Kuba Attila prize...
2021-06-24