

Bioinformatics 
Informatical support is organic part of modern biological research. With the available computing capacity of a decent PC, huge amount of data can be processed in almost real time. Mostly data mining, image or video processing of live cells are the center of these projects in collaboration with the Department of Pharmacology and Pharmacotherapy.
To help the tedious work needed for confocal image analysis an automatic cell wall detector was developed and sucesfully applied for gap junctions detection on fluorescent microscopic images. For further details read the works presented in ISHR 2011 (Haifa) and in FCVB 2014 (Barcelona).
The rate and dynamics of contracting cells can be detected using video analysis, tend to be much more accurate than the analogue computing solution. The orientation of the cell is not important anymore. Demonstration video can be downloaded here (~21MB).
Embedded systems 
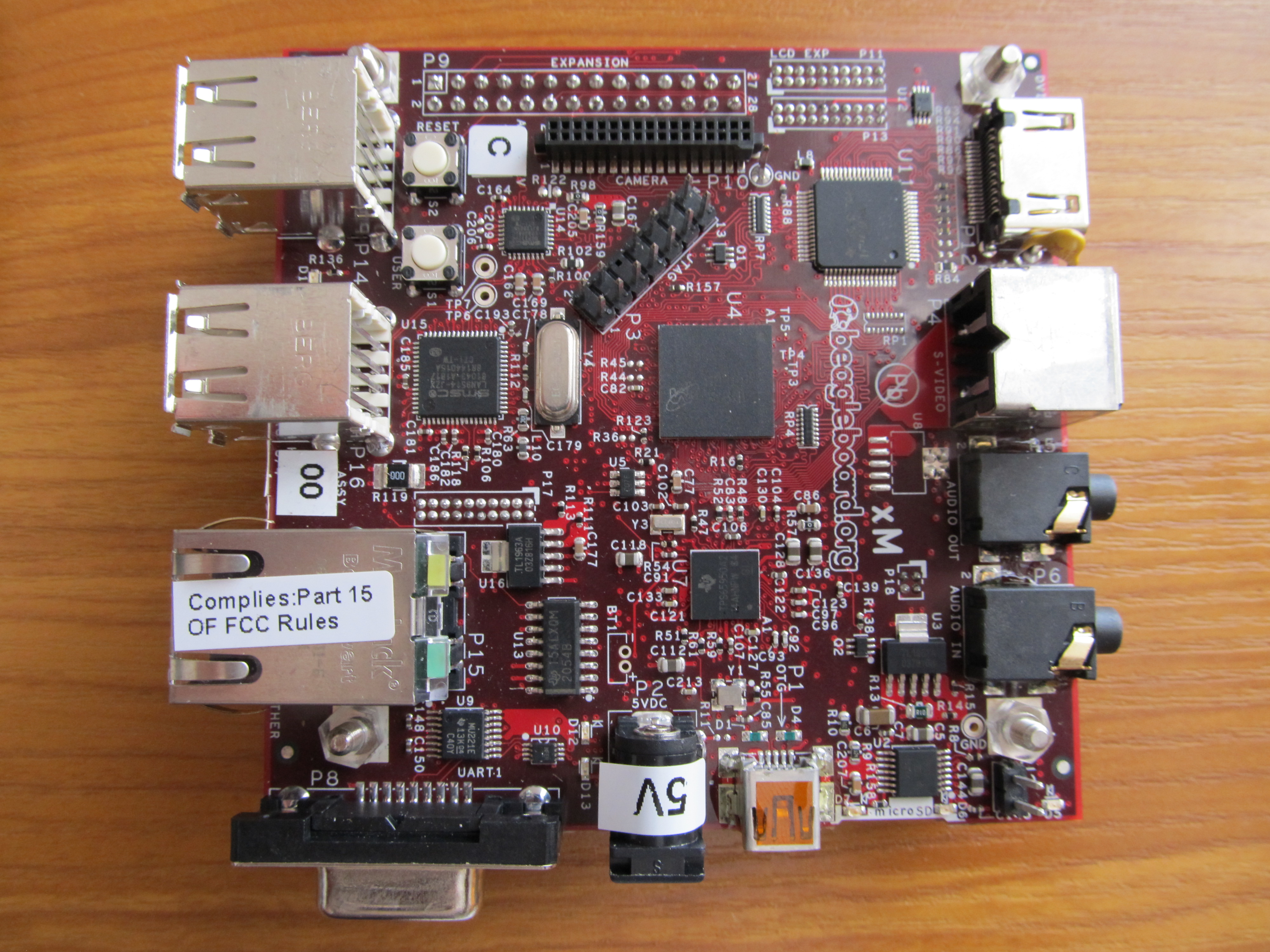
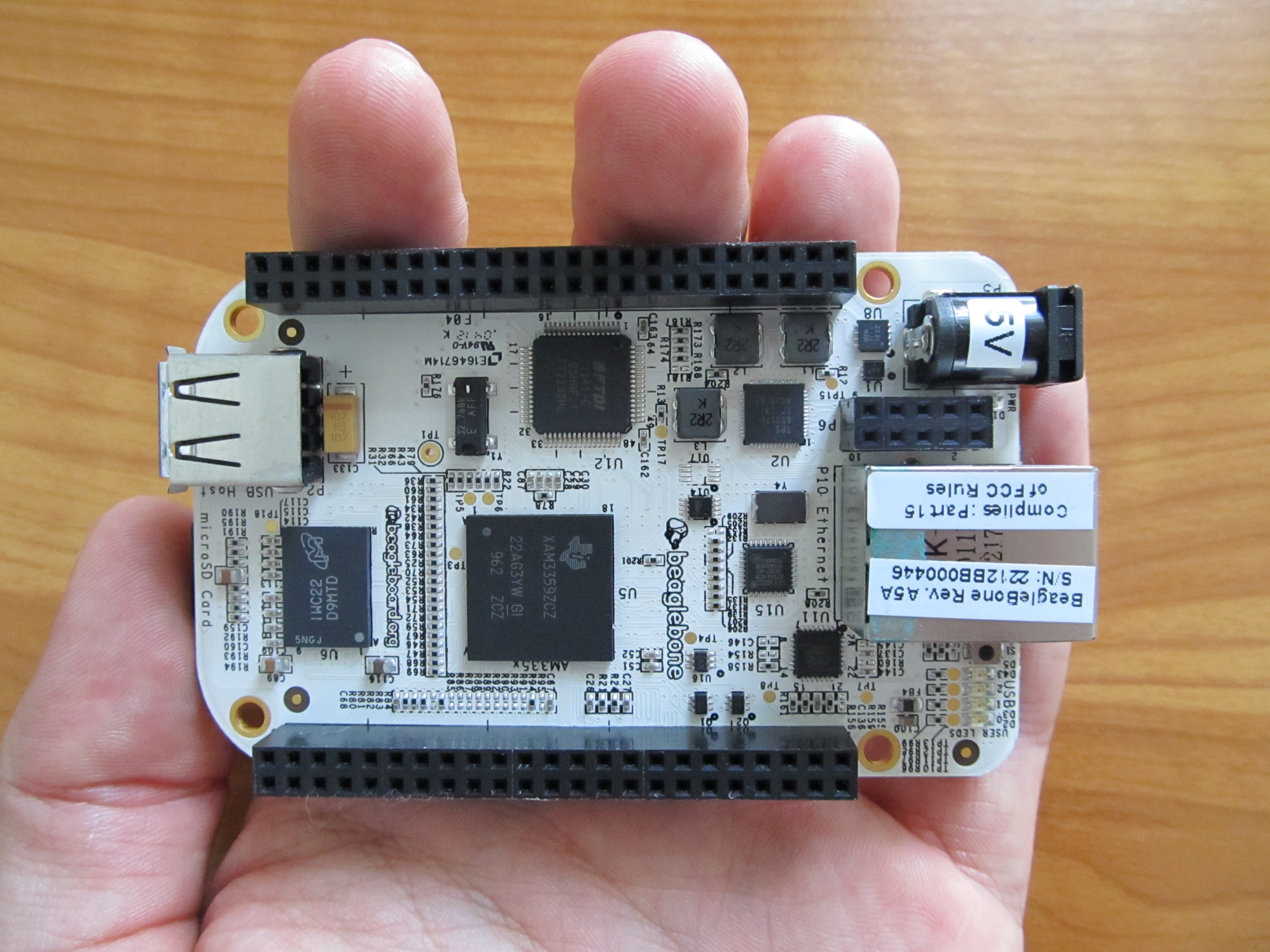
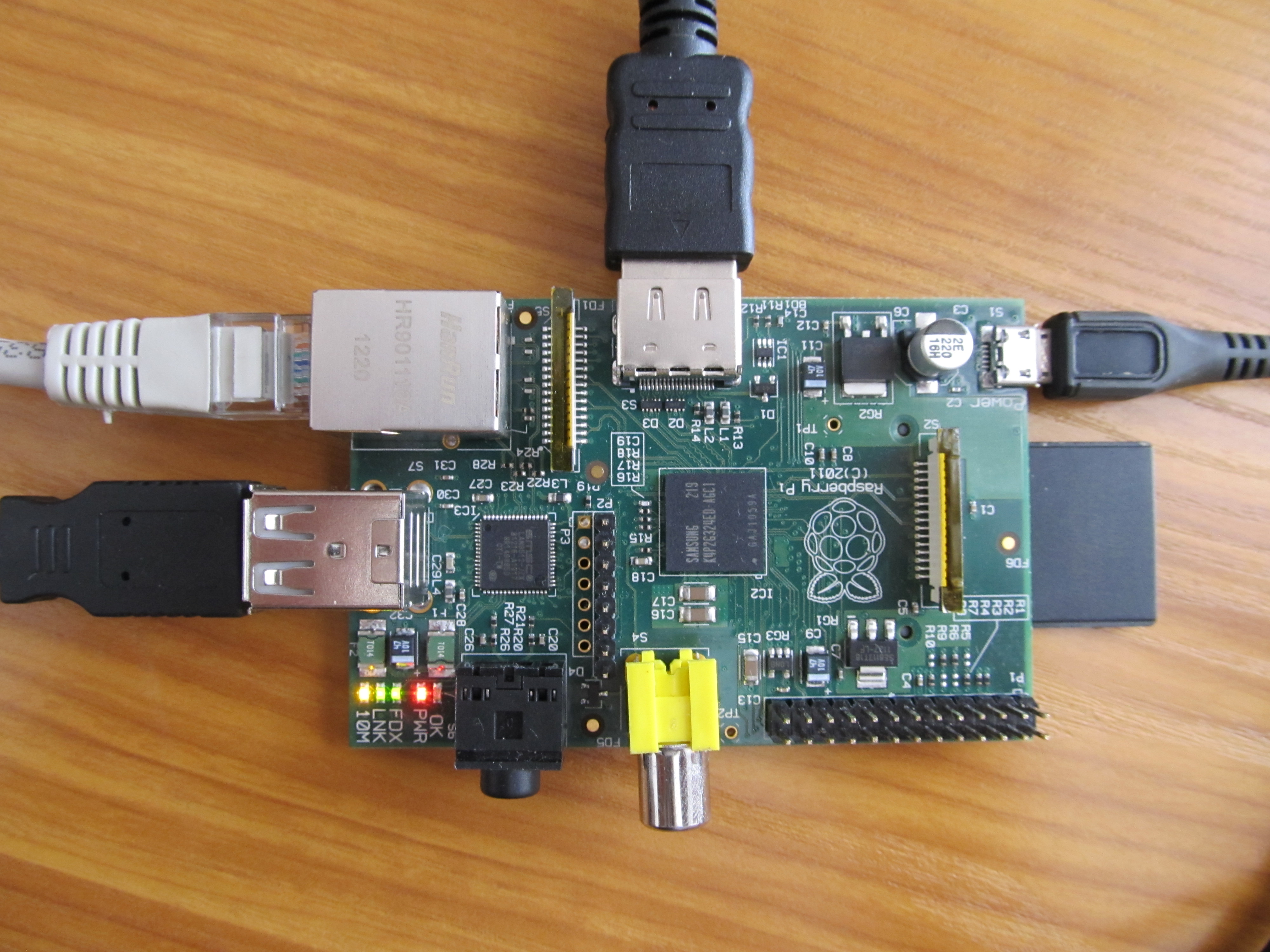
The rapidly evolving embedded systems are just about to change the role of personal computers. Many projects are available only because of the processing capabilities or low price of these boards.
These projects starts with chosing and customizing hardwares like Beagle Board Xm, BeagleBone, or Raspberry Pi. The next step is to customize the operating system, which is mostly Android OS or some variant of the also popular Debian OS
{kind=link}
{kind=link}
{kind=link}
Autonomous mobile robot 
The main goal is to achive obstacle avoidance in a dynamically changing environment. Motion planning is based on intelligent overlapping sensors, such as ultrasonic or infrared sensors viewing at the same direction.
Khepera III robot programmed to do basic obstacle avoidance using the nine infrared sensors: video.
The same robot with a controller based on measured speed, and calculated acceleration. It still uses only the short-range infrared sensors, but the results show smoother movement: video1 video2.
The robot can find a way from a specific starting position to the target position while avoiding obstacles. For this task, a continous position estimation process (odometry) had been implemented: video1 video2.

The wireless SunSPOT sensor device was programmed to function as a simple remote controller with basic feedback: video.
Test run with the assembled system: video.
A semiautonomous system with two main goals. First, to follow orders from human operator; and secondly to avoid obstacles. The second goal has higher priority to maintain collision-free operation: video.
Bipedal motion
These days legged mobile robots can walk on uneven terrain, and on stairs using basicly nonelastic joints. Their primal disadvantage is the power consumption in contrast to a wheeled robot. Therefore main goal is to achieve more effective walking with elastic joints.
The first step is to find the ideal actuator type (hydraulic, pneumatic, rotation/linear motor, etc.). In biology a commonly used and effective system for changing location is the leg actuated with muscles. Mimicing biology is the key for efficiency, therefore an experimental linear motor was developed first to transform electricity to linear motion.
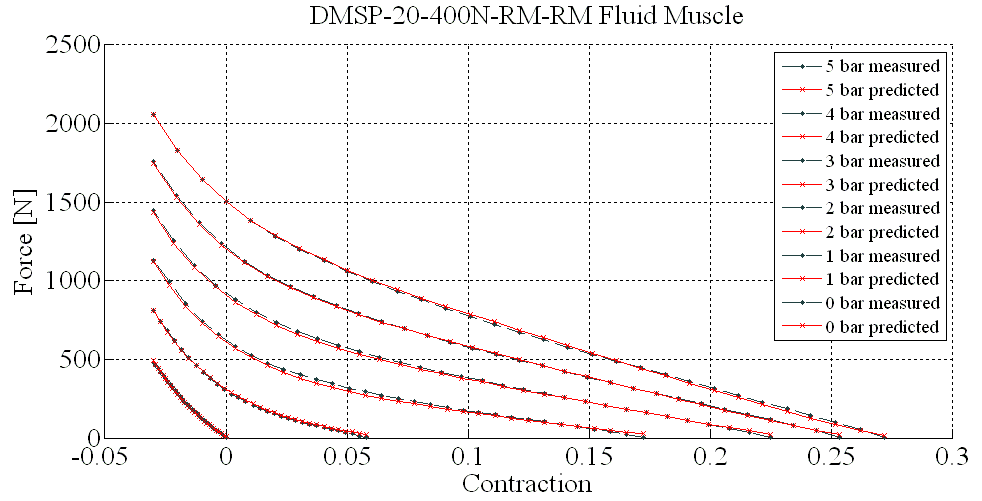
An alternative very promising approach is the pneumatic artificial muscle (PAM). Only drawback was the lack of good transfer function between contraction, relative pressure and force. The prediction could be significantly improved with a new function based on a statistical approach (see publication).
Suggested multimedia player for the video files is: VLC media player.