Jelenlegi hely
Robotically assisted, image guided planning and execution of percutaneous therapies
Computer Integrated Surgical Systems of Technology, Johns Hopkins University, Baltimore, MD, USA
The planning and execution of percutaneous therapies are very diverse. We investigated those that make use of a localization frame. When using a so called stereotacic frame, a base is rigidly attached to the patient that provides the coordinate system (Figure 1). Execution can be done using robots when the localization frame is attached rigidly to the robot itself.
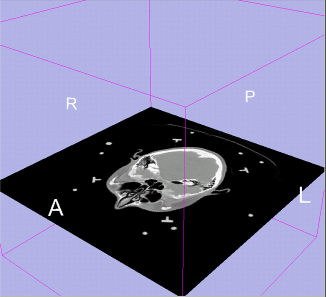
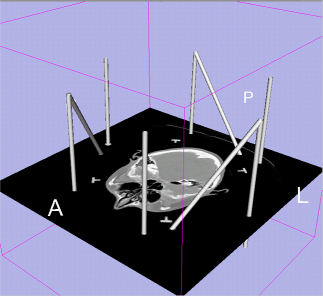
Figure 1. A CT image slice showing the cross sections of the CRW frame around the head (left) and together with the registered geometric model of the frame (right).
The assumption is that the given device is able to rotate the needle around a fixed point (often it is the tip of the needle), insert it to a given depth and retract it. The spatial movement of the needle is not necessary but might be useful. The localization frames contain rods which are well visible in the image together with the patient and their geometry provides that the solution is unique even if only one image slice is available. Although the build-up of the devices can be very diverse, their operational principle is very similar. Three objects can be distinguished which are defined in their own coordinate systems. The first is the patient represented by the images taken of him/her, the second is the needle or tubular device that is to be inserted, and the third is the localization frame. The task of registration is to establish the geometrical correspondence between these coordinate systems (Figure 2).
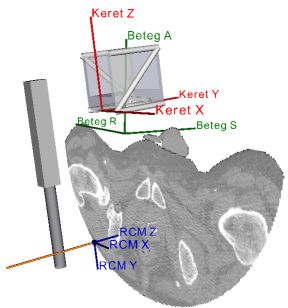
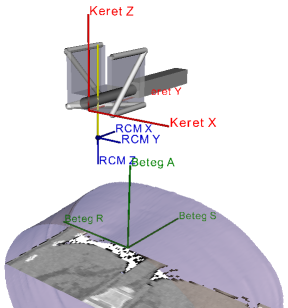
Figure 2. Correspondence between the coordinate systems of the patient, the frame and the operating device for different robot configurations after registration. The coordinate systems are labeled as "Beteg", "Keret" and "RCM", respectively in the images.
We developed an iterative registration algorithm where the rods are modelled with line segments, the centroids of the rod intersections in the images are identified manually or semi-automatically and registered to the line segment models in the least-squares sense. Even a single image slice containing some intersections of the rods can be sufficient for the unique solution. More rod intersections and more image slices available make the precision of registration much better. The algorithm requires the specification of which set of points represents which rod.
When the geometrical relationship between the three coordinate systems is established, the planning and execution steps of the therapy can be given in a unified framework. It is referred to as abstract control level, since it is not necessary to know what the actual physical device is and how it works. The abstract movement parameters are computed at this level. The task at the physical control level is the actual execution of the operation. This can be done when the inverse kinematics of the device is known.
We developed a therapy planning and controlling application based on this framework (Figure 3). CT scans are taken from the patient, the RCM robot family is controlling the needle to which the Susil-frame is rigidly attached. Pre-clinical phantom experiments were designed to prove the basic feasibility of this system. The results showed that the primary source of error is attributed to the interaction between the patient and the needle. In real situations the movement of the prostate during needle insertion and the movement of the patient after the CT image is taken can cause problems. Although these problems might be handled, we assumed they are negligible. Results of preliminary experiments indicate that the robotic system may be suitable for transperineal needle placement into the prostate and shows potential in a variety of other percutaneous clinical applications.

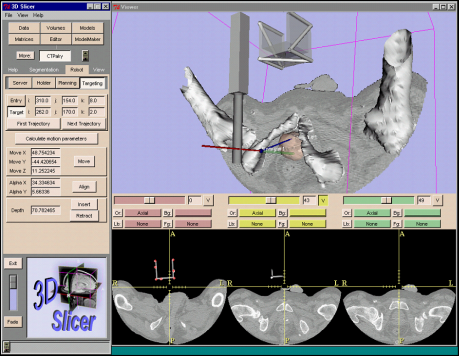
Figure 3. The physical space of the operating room (top image) and the CT image taken from the patient, the surface model of the bones, the geometrical model of the operating device visualized together with the needle trajectories during the execution of the treatment (bottom image).