Jelenlegi hely
Elastic Registration of 3D Objects

In this project, a non-trivial extension of the nonlinear framework for aligning planar shapes (Recovering Diffeomorfic Shape Deformations without Correspondences) is developed for 3D elastic objects. The basic idea is to set up a system of nonlinear equations whose solution directly provides the parameters of the aligning transformation. Each equation is generated by integrating a nonlinear function over the object’s volumes.
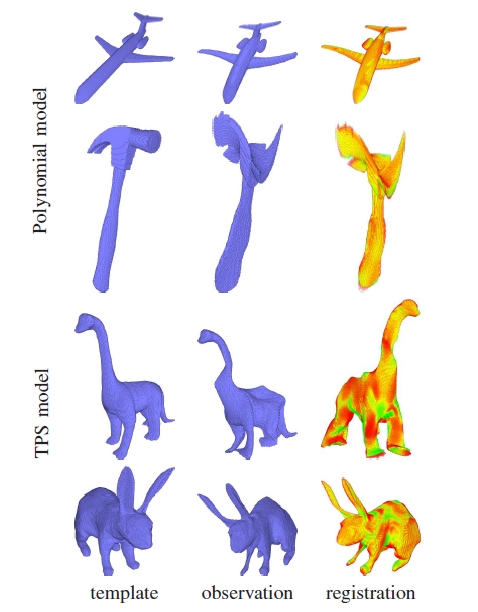
When registering a pair of objects, first we have to characterize the possible deformations. From this point of view, registration techniques can be classified into two main categories: physical model-based and parametric or functional representation. Herein, we deal with the latter representation, which typically originate from interpolation and approximation theory. Two broadly used classes of such parametric models are polynomials and splines, in particular thin plate splines (TPS)
Polynomial deformations are governed by fewer parameters and are acting globally on the shapes, hence regularization is not needed. Moreover, many non-polynomial transformation can be approximated by a polynomial one e.g. via a Taylor expansion.
Thin plate spline models are useful whenever a parametric free-form registration is required but the underlying physical model of the object deformation is unknown or too complex. Furthermore, TPS models can be extended to include various regularizations, such as the bending energy.
Syntethic tests
The algorithm had been quantitatively evaluated on large synthetic datasets generated by the corresponding transformation model. The database consisted 500 images for the polynomial test and 750 images for the thin plate spline tests. The sizes of the objects were between 0.1 and 2.5 megavoxels.
 |
Robustness tests
The robustness against segmentation errors was also evaluated on simulated data: we randomly added or removed squares uniformly around the boundary of each slice of the observations.
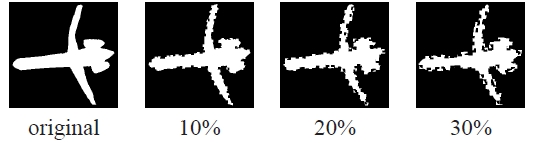 |
For the polynomial model, the surface error of 15%, 22% and 30% of the original object volume were tested and we find that the proposed approach is quite robust up to as high as 22% surface error.
For the thin plate spline model, the surface error of 10%, 20% and 30% of the original object volume were generated. Using this model the proposed approach is quite robust up to as high as 20% surface error.
Real images
Lung alignment is a crucial task in lung cancer diagnosis. During the treatment, changes in the tumor size are determined by comparing follow-up PET/CT scans which are taken at regular intervals depending on the treatment and the size of the tumor. Due to respiratory motion, the lung is subject to a nonlinear deformation between such followups, hence it is hard to automatically find correspondences. A common practice is to determine corresponding regions by hand, but this makes the procedure time consuming and the obtained alignments may not be accurate enough for measuring changes.
Our algorithm has been successfully applied to align 3D lung CT scans. Both of models proved to be a good approximation of the underlying physical deformation. Promising results were obtained on the available 8 image pairs. In order to align the inner parts also, proper regularization is very important for thin plate splines. Therefore we added the bending energy of the transformation to the algebric error of the equation system.
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |