Működési elve
Az OpenCV implementáció az alábbi lehetőségekkel rendelkezik.
Fő lépések
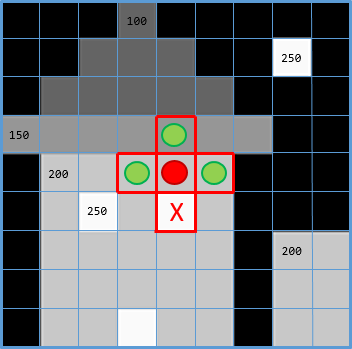
- Egy kiindulási pont szükséges, amely a szegmens része.
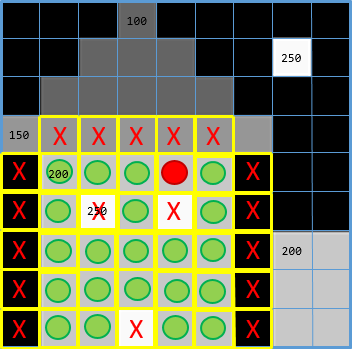
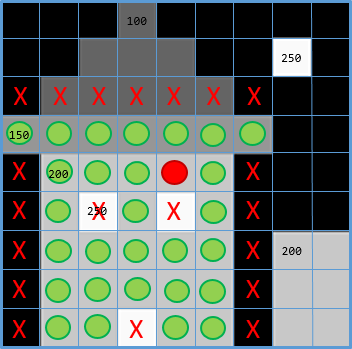
- A szegmens elemeinek 4- vagy 8-szomszédságát vizsgálva amennyiben a szomszéd teljesíti a hasonlósági kritériumot, akkor hozzávesszük a szegmenshez és az ő szomszédait is megvizsgáljuk.
Hasonlósági kritérium lehetőségek
- Globális eltérés: A kiindulás pont és a vizsgált pont közötti eltérés egy megadott tartományon belül van.
- Lokális eltérés: A vizsgált pont és objektumhoz tartozó szomszédja közötti eltérés egy megadott tartományon belül van.
Az algoritmus működésének példákon keresztüli, részletes magyarázata az oldal utolsó blokkjában olvasható.
A szakirodalomban a módszer számos további változata megtalálható. A hasonlóságot számíthatnánk akár a szegmenst éppen alkotó képpontokértékek átlagaként, az eltérést pedig lehetne a szórás értékkel súlyozni. Egy ilyen megközelítés esetén akár több pontból álló kiindulási pontlistánk is lehetne. Ezeket egyelőre nem valósítja meg az OpenCV implementáció.